Interaction. Power. Robots.
I am fascinated by the power of, and embedded in, Human-Robot Interaction (HRI) design. My work has a strong practical focus towards understanding this power (both the good and the bad) in order to ensure we are developing socially sustainable HRIs (and/or the machine-mediated human-human interactions these often actually represent) that support human flourishing. I consider the impacts of HRI and robot deployment at the individual level as well as at the family, group, community and societal levels. I see my work as contributing to the tangible application and realisation of initiatives like the European Ethics Guidelines for Trustworthy AI.
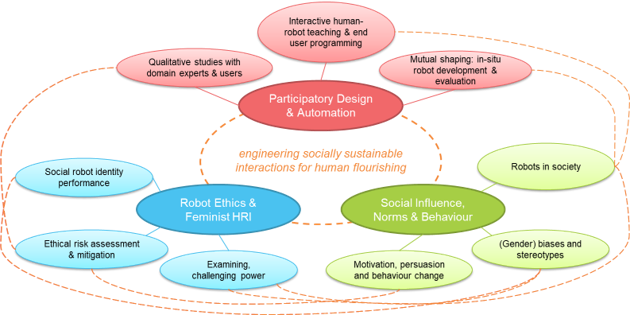
My work is very interdisciplinary, drawing from design, psychology and the social sciences as well as robotics, AI, computer science and engineering. My research interests include participatory design and automation (i.e. human-in-the-loop machine learning, interactive machine learning), social influence, norms and behaviour and applied robot ethics; contributing new ways of *doing* human-robot interaction in addition to the design and evaluation of specific interaction strategies in real-world application domains.